筆者本來想繼續深耕tf系列的,但是又覺得要講好tf,需要先講RViz這個顯示工具,所以就先跳來寫RViz囉!
繼續使用昨天的小烏龜範例,這時候打開terminal輸入rviz叫出RViz視窗:
$ rviz
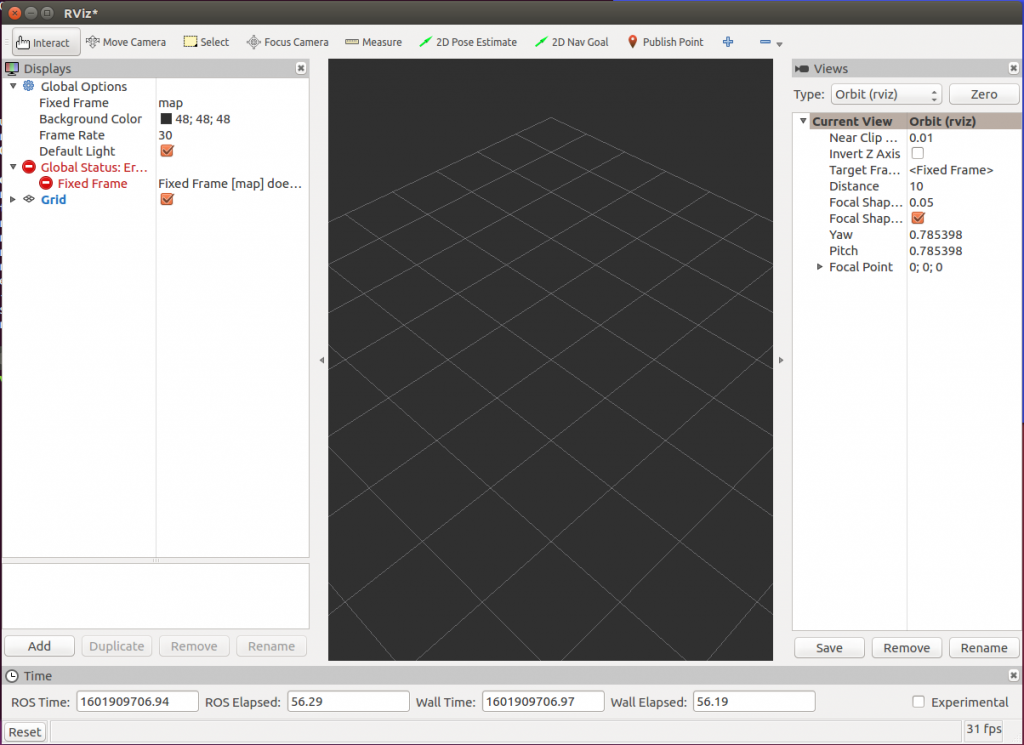
可以看到出現一個圖形化介面,這就是RViz啦!
這時雖然什麼東西都沒有,這是因為rviz defaulf的介面什麼東西都沒有設定,所以要自己來設定:
首先,把左上角的fixed frame改成world,並且按左下Add按紐加入TF的圖層: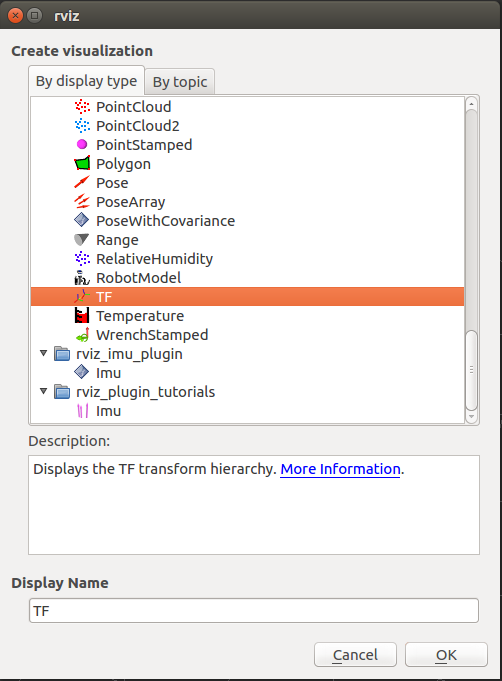
再回到畫面上就可以看到兩條線,一端是world,另外一端分別是turtle1和turtle2,用前幾天的教學移動小烏龜,就可以看到tf的移動顯示在rviz上囉!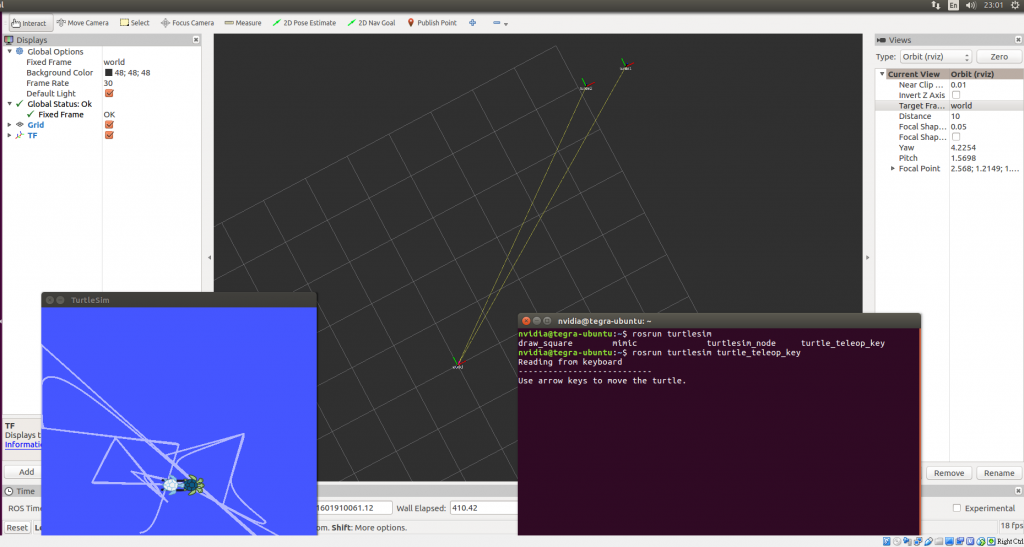
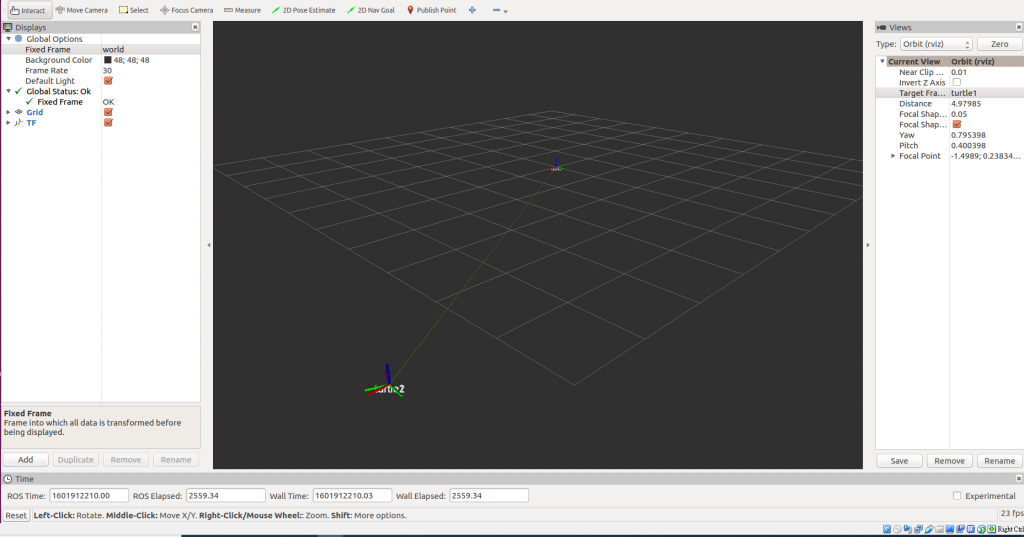
細看rviz可以看到,他的端點其實是由三條不同顏色的線組成,分別代表x,y,z軸(紅,綠,藍)。端點表示該topic的座標系,如兩隻烏龜分屬不同的區域座標,而中間的黃色線就表示TF將它們串連在一起,並且透過world顯示兩者之間比較下的關聯。
那麼既然透過小烏龜大致了解rviz的顯示了,就來講解一下rviz的視窗分別代表什麼:
rviz上面一排interact/move Camera/select等等的按鈕就是rviz的一些工具,也可以透過旁邊的加減號新增/刪除。而最下排顯示的就是時間囉!
暫時介紹rviz到這邊,總而言之就是一個顯示的工具! 可以讓使用者更方便知道不同的node之間的關聯,並且透過tf把所有的node串聯在一起,有沒有覺得很好用呢XD
http://wiki.ros.org/rviz
http://wiki.ros.org/rviz/Tutorials
http://wiki.ros.org/rviz/UserGuide
http://wiki.ros.org/tf/Tutorials/Introduction%20to%20tf
https://blog.csdn.net/liweibin1994/article/details/53115639


 iThome鐵人賽
iThome鐵人賽